Update: Overcoming workspace uncertainties for enabling adaptive co-robotized construction work
Seeding To Accelerate Research Themes (START) is a program in Michigan Engineering that provides a mechanism for faculty members to obtain funds for new and innovative research.
In 2022, CEE’s Vineet Kamat, the John L. Tishman Family Professor of Construction Management and Sustainability, and Carol Menassa, Professor and John L. Tishman Construction Management Faculty Scholar, received a START grant for their research titled, “Overcoming Workspace Uncertainties for Enabling Adaptive Co-robotized Construction Work.”
Seeding To Accelerate Research Themes (START) is a program in Michigan Engineering that provides a mechanism for faculty members to obtain funds for new and innovative research that is not yet ready for external proposal submission, and is provided to faculty to incentivize increased research expenditures.
In general, START grants promote collaboration among faculty members throughout the CoE to accomplish common goals within a specific research area or theme. There may be one or more project teams working together within a theme, each contributing a unique perspective to gather information, identify a need or solve a problem.
With $30K in funding, the research aims to advance the scalability of co-robots working in unstructured industrial environments by developing perceptual, modeling and planning capabilities needed to adapt to unexpected workspace geometries and perform work collaboratively with humans.
The team is exploring the sensing modalities and strategies that best enable co-robots to perceive objects and features in highly unstructured and cluttered environments typical of construction sites. They also are investigating modeling techniques to allow robots to convert raw sensory data into meaningful and actionable models of rigid and semi-rigid workpieces encountered in construction. Third, they are exploring planning techniques to enable robots to generate adaptive plans based on their understanding of the objects in their environment and the human co-workers’ instructions, their proximity to human co-workers in the workspace, and their estimation of the human co-workers’ trust. Finally, through integration and experimentation in laboratory and construction site environments, they are evaluating performance levels attainable by human-robot teams in performing work adaptively.
“The core of our research is wholly and centrally focused on improving human workers’ abilities to do more productive work, with greater safety, and with fewer short- and long-term risks of injury to themselves,” Professor Kamat said. He noted that construction work emphasizes human-robot collaboration. “Although some aspects of work are done by the robot or machine, the planning and cognitive aspects remain with the human,” he added. “Our goal is to make work more accessible to human workers, reduce the burden of the human worker and give some of the planning and cognitive access to the co-robot.”
Professor Kamat explained that the idea behind the team’s work focuses on three elements: “There is the physical component, in that physical energy is required,” he said. “Work also has a planning component, in that work needs to be planned and sequenced. And construction work also has a cognitive component, which means that as work is being done, the agents doing the work have to constantly scan the environment and take the next steps to complete the project based on the work that is evolving.”
As part of this project, Professors Kamat and Menassa have equipped the co-robots with RGB cameras and LIDAR sensing devices to be the eyes of the co-robot in perceiving the environment around it. The images the sensors collect are processed to create a semantic model of the work scene, breaking it down into segments that the co-robot can understand.
Once the model is created and incorporated into a three-dimensional building information model, or BIM, work planning, path planning and obstacle avoidance computations can occur, permitting the robot to wait for more detailed information and direction from its human collaborator.
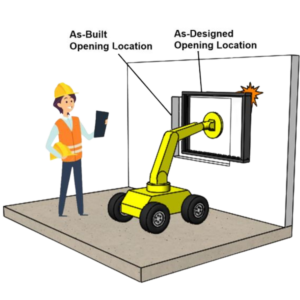
Eventually, the project will evolve to determine if a co-robot can be trained to encounter an unexpected situation and then resolve, either independently or with assistance from a human partner, the uncertainty it faces through adaptive manipulation. This means the co-robot adapts to the imperfections it encounters. “Once the co-robot cognitively understands the site, it can vary its work plan according to what it sees,” Professor Menassa said. “One issue in construction is that there can be significant differences between how a project unfolds on-site and the initial design documents for that project. We want to get to the point that through the process of the co-robot perceiving its environment and understanding the differences between what it is seeing in reality versus in design documents, it will interpret the changes it detects and allow updates to be made.”
MEDIA CONTACT
Mason Hinawi
Marketing Communications Specialist Department of Civil and Environmental Engineering